
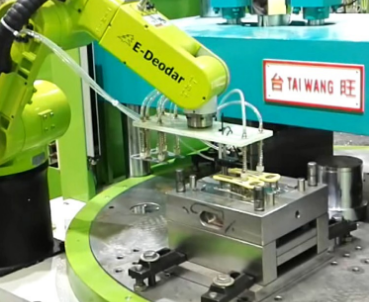
| Below is a chart that shows the differences between implementing a six-axis robot and a linear/gantry unit to do part extraction. | |
| Jointed Arm Robot: StiffnessShelf-mounted robots can demold parts either with force (forced removal from negative mold) or delicately (demolding from core).
Despite the extended position of the shelf-mounted robot during demolding, it retains its extreme stiffness. The flexibility of the gripper allows the parts to be twisted freely out of the (sometimes enormous) undercutting of the injection mold. |
Linear/Gantry: StiffnessBy observing a linear robot in the lowest position (telescope extended), it quickly becomes apparent that the stiffness is greatly reduced due to the long lever arm.
Due to this weak point additional mechanical support is needed. For this the motion is restricted on linear motion. |
| Jointed Arm Robot: Mold CostsComplex parts with undercutting can be extracted from the negative injection mold without the need for additional, cumbersome gripper props. As for the injection molds themselves, it is possible, at least partially, to dispense with ejectors, core pullers and side loaders, thus making the molds considerably cheaper.
Potential savings on molds. |
Linear/Gantry Systems: Mold CostsThe linear/gantry systems are only of limited use for removing complex parts from negative molds; in most cases, the articles to be demolded are ejected.
Complicated and expensive molds with side loaders, core pullers and ejectors are required, as are additional props on the extractor gripper. Expensive molds with additional functions. |
| Jointed Arm Robot: Large Volume PartsUsing toolchanger carriages mounted on either side, it is possible to equip injection molding machines with tools/molds that are actually larger than the gap between the two beams.
Because of its six-dimensional freedom of movement, the shelf-mounted robot positioned on top of the machine is able to demold these bulky parts. For robot no problem. |
Linear/Gantry: Large Volume PartsExternal axes are required for the removal of large-volume parts using linear handling devices. In addition, a spacer is required on the fixed mold clamping plate in order to demold the large-volume parts over the upper machine beams.
Additional axes required: |
| Jointed Arm Robot: Cleanliness/QualityEnclosed guide mechanisms only very rarely cause problems with dirt. | Linear/Gantry: Cleanliness/QualityBecause of the exposed tracks, there is the danger of lubricating oil from the traversing axes dripping on the demolded plastic parts.
This causes major problems and loss of quality in the case of subsequent painting. It is often necessary to repaint the parts. |


Leave a Reply
Want to join the discussion?Feel free to contribute!